
TwinCAT Vision – Vizualizarea proceselor integrată cu ușurință în tehnologia de automatizare
Detectarea automată, trasabilitatea și controlul calității devin
task-uri din ce în ce mai importante în toate stadiile de producție.
Aceste tendințe sunt asistate de camere puțin costisitoare și
computere de performanță ridicată, care facilitează utilizarea
tehnologiei de procesare a imaginilor în mai multe zone ca
oricând. Procesarea imaginilor are multiple avantaje comparativ
cu inspecția făcută de oameni, în special în ceea ce privește
controlul calității. Inspecția optică bazată pe procesarea de
imagini se poate derula într-o manieră repetitivă și determinată.
Măsurarea părților până la nivel micrometric, care este aproape
imposibilă pentru oameni, poate fi implementată cu ușurință.
În aplicații de automatizare, procesarea de imagini a
fost, în mod normal, gestionată separat și adesea direc –
ționată către integratori externi de sistem. Între timp, pro –
gramatorii PLC s-au extins în numeroase direcții, inclu –
zând controlul mișcării, tehnologia siguranței, tehnologia
de măsurare și domeniul roboticii. Astăzi este posibilă
combinarea tuturor acestor funcții într-un singur sistem
de comandă-control de pe un singur calculator. În general,
procesarea de imagini a rămas într-o cutie neagră, pe un
calculator de înaltă performanță, cu intrumente de con –
figurare și limbaje de programare specifice, ori implemen –
tată direct în camere performante special configurate.
Dezavantajul folosirii unui calculator separat este repre –
zentat de faptul că și cele mai mici modificări necesită
date de intrare de la un specialist în locul unui progra –
mator PLC, de unde rezultă costuri ce pot fi evitate. În
cazurile în care un integrator de sistem terț este implicat,
atunci și expertiza rămâne externă. În plus, comunicația
dintre procesarea de imagini și sistemul de control trebuie
reglată, proces care este predispus erorilor. Drept urmare,
o sincronizare exactă în procesarea de imagini nu poate fi
asigurată. Procese externe, precum sistemul de operare,
pot afecta timpul de procesare și timpul de transmisie,
astfel încât rezultatele să nu ajungă la controller în timp
util.

Noul software, TwinCat Vision, combină
ambele domenii într-un sistem integrat.
Configurația, în special cea a camerelor, este
derulată în același program TwinCAT în care se
face și configurația pentru fieldbus-uri sau a axelor
de mișcare. Pentru programare, pot fi folosite
limbajele de programare PLC obișnuite. În acest
fel, se pot obține economii substanțiale din
moment ce nu este nevoie să se învețe limbaje de
programare speciale și nu este necesară folosirea
unui instrument de configurare special. Dificultățile
de comunicație dintre procesarea imaginilor și
control nu sunt numai eliminate, dar mai mult de
atât, procesarea imaginilor și componentele de
control pot comunica direct între ele, deschizând
astfel noi posi bilități de aplicație. Totul este
integrat într-un singur pro gram și mediu runtime –
aceasta este inovația principală adusă de TwinCAT
Vision.
Arhitectura
Automatizarea bazată pe PC combină toate funcțiile de
control-comandă de pe o platformă PC, astfel beneficiind
de o interfață Gigabit Ethernet. Bazat pe Gigabit Ethernet,
GigE Vision este un standard de comunicație care permite
transmiterea sigură și rapidă de imagini de la camere.
TwinCAT Vision oferă un driver în timp real pentru inter –
fața Ethernet, care pune la dispoziție datele de imagini
direct în memoria controller-ului. Cu suport pentru GigE
Vision, TwinCAT Vision este de asemenea un sistem
deschis care face posibilă folosirea camerelor de la un
număr mare de furnizori.
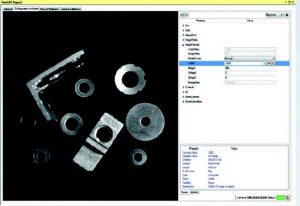
Primul pas după efectuarea conectării implică, de
regulă, configurarea camerei. Producătorii de camere cu
interfață GigE Vision oferă o descriere a configurării în
format GenApi. Instrumentul de configurare din TwinCAT
Vision citește parametrii și îi pune la dispoziția utiliza –
torului într-o manieră clar aranjată. Schimbările de confi –
gurare, precum ajustarea timpului de expunere și setarea
unei regiuni de interes, pot fi făcute ușor și rapid, iar
rezultatele pot fi observate în imaginea live a camerei.
Pe lângă instrumentul de configurare a camerei,
TwinCAT Vision oferă un alt instrument pentru calibrarea
geo metrică a camerei. Acesta determină parametrii pentru
descrierea mapării de la coordonatele imaginii la co –
ordonate reale și vice-versa. De asemenea, este posibil să
se coreleze poziții din imagini cu coordonate reale și să se
convertească rezultatele măsurătorilor din pixeli în sistemul
metric. Pe lângă distorsiuni de perspectivă, dis torsiuni nonlineare
ale lentilei sunt luate în considerare, care pot fi
observate sub forma de distorsiuni vizibile ale imaginii.
Pentru calibrarea camerei, una sau mai multe imagini a
unui model de calibrare dorit sunt necesare inițial. Aceste
imagini pot fi preluate direct în programul de engineering
sau pot fi importate imagini existente. În urma specificării
modelului de calibrare, parametrii sunt calculați automat.
Pe lângă modelele standard 2D, precum modelul tablei de
șah ori cel al cercurilor simetrice sau asimetrice, utilizatorii
pot folosi și modelele proprii. Acestea pot fi și modele 3D.
Ca o alternativă pentru folosirea programului de calibrare,
această operație poate fi făcută din PLC.
Picture credits Beckhoff Automation
Procesarea de imagini în PLC
Imaginile neprelucrate sunt transferate direct de la
cameră în memoria router-ului PLC-ului prin GigE Vision.
În acest scop, camera trebuie să fie setată pe modul de
preluare imagini și în funcție de configurația camerei,
imagini individuale trebuie declanșate. Funcția block
FB_VN_GevCameraControl este disponibilă pentru
această procedură.
Pentru o setare foarte precisă a momentului declan –
șării, modulul de ieșire tip EL2262 care permite sincro –
nizarea timpului este disponibil în sistemul Bekchoff I/O și
poate fi folosit să trimită un semnal de declanșare către
cameră, cu o precizie de microsecunde. Din moment ce
totul se petrece în timp real într-un context temporal de o
precizie ridicată, preluarea imaginilor și poziția unui ax, de
exemplu, pot fi sincronizate cu mare precizie – o cerință
tot mai des întâlnită de programatorii PLC.
Camere multiple pot trimite semnale output pentru
eve nimente predefinite, precum începerea capturii de
imagini. Aceste semnale pot fi preluate prin intermediul
unui modul de intrare de la Beckhoff și apoi folosite în
PLC pentru o sincronizare precisă a unor procese ulte –
rioare.
TwinCat Vision oferă o nouă bibliotecă de procesare a
imaginilor în PLC care conține numeroase algoritmuri de
procesare. De exemplu, imaginile pot fi scalate sau con –
vertite în timpul pre-procesării la o anumită culoare
disponibilă, iar anumite caracteristici pot fi accentuate sau
diminuate prin intermediul funcțiilor filtrelor.
Imaginea poate fi digitalizată apoi prin intermediul unor
anumite praguri, procedeul fiind urmat de trasarea de
contururi pe imaginea rezultată. Contururile obținute în
acest fel pot fi filtrate în funcție de caracteristicile lor,
rezultatul fiind o selecție de contururi interesante sau
porțiuni de imagini, care sunt la rândul lor potrivite pentru
identificarea obiectelor și măsurători. Cu o cameră cali –
brată anterior, diferite caracteristici pot fi transformate
înapoi în sistemul de coordonate global, astfel încât poziția
și datele de măsurători pot fi specificate cu precizie în
coordonate reale.
Prin integrarea TwinCAT Vision în mediul TwinCAT în
timp real, sincronizarea funcțiilor de procesare de imagini
poate fi monitorizată prin funcția de watchdogs, care
întrerupe funcțiile după o perioadă de timp definită sau
într-un anumit punct din ciclul de procesare. În același
timp, utilizatorul primește orice rezultat parțial care este
valabil la momentul respectiv. În plus, funcțiile de proce –
sare de imagini potrivite pot fi alocate automat mai multor
CPU-uri pentru procesare în paralel prin intermediul așa
numitelor job tasks, astfel încât TwinCAT utilizează în mod
optim capabilitățile multi-core din TwinCAT3.
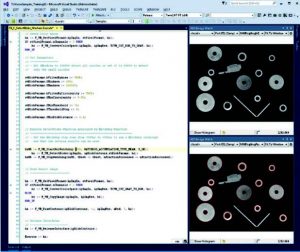
În timpul analizei și vizualizării rezultatelor, toate
imaginile pot fi prezentate sub formă de imagini, nu doar
sub formă de date binare. Înainte de acest pas, este
posibil să se editeze rezultate, precum informații de po –
ziționare, în imagini. Cazurile de utilizare exemplară includ
marcaje pe culori a contururilor de imagini filtrate sau
marcarea bună/rea a părților. Utilizatorul este constrâns
numai de limitele imaginii. Imaginile pot fi afișate direct în
TwinCAT Engineering în ADS Image Watch sau pentru
utilizatorul final în TwinCAT HMI.
PLC si procesare de imagini într-un program universal
TwinCAT Vision combină tehnologia clasică de auto –
matizare cu procesarea de imagini, ceea ce îl face foarte
ușor de utilizat. Pe partea de inginerie, configurarea ca –
merei și calibrarea geometrică a camerei sunt derulate
direct în TwinCAT Engineering. Alte instrumente nu sunt
necesare. Procesarea de imagini este programata pe baza
limbajelor folosite de programatorii PLC, de exemplu IEC
61131-3, ceea ce înseamnă că nu trebuie învățat
un limbaj de programare special. În plus, este
posibil să se răs pundă direct în PLC rezultatelor
procesării de imagini, exact în următoarea linie de
cod. Prin declanșarea camerei din mediul realtime,
captura de imagini și PLC-ul sau controlul
mișcării pot fi complet sincronizate.
Algoritmii de procesare a imaginilor sunt cal –
culați în timp real în TwinCAT, asigurând o exe –
cuție sincronizată între task-uri și monitorizare în
timp real prin funcția de watchdogs.
TwinCAT Vision se folosește de capabilitățile
multi-core ale TwinCAT 3 pentru a executa auto –
mat algoritmi pe diferite procesoare sau nuclee
atunci când sunt va labile. Pentru această capa –
bilitate de procesare în paralel nu este necesară
programare specială din partea utili zatorului.
TwinCat Vision este dedicat utiliza torilor care se
confruntă cu provocări și opor tunități de a
gestiona task-uri vizuale în cadrul sistemului de
control sau care își doresc să facă acest lucru.
Prin integrarea fără probleme, TwinCAT Vision
este ușor de utilizat și programat. De asemenea,
este potrivit pentru utilizatorii care au nevoie de un grad
ridicat de sincronizare între procesarea ima ginilor, PLC și
controlul mișcărilor. Din moment ce întâr zierile în proce –
sare sunt eliminate iar procesarea algo ritmilor este moni –
torizată în funcție de timp, sistemul este capabil să răs –
pundă direct și determinat. Task-uri de pro cesare clasică
de imagini precum căutarea și recu noașterea sau mă –
surarea unor părți, pot fi făcute cu ușu rință cu TwinCAT
Vision. Pe lângă PLC, tehnologia pentru controlul mișcării,
robotică și tehnologii de măsurare, utilizatorii TwinCAT
pot adăuga acum și procesarea de imagini pe lista
funcțiilor integrate în sistemul TwinCAT.
(articol original: TwinCAT Vision – Machine vision
easily integrated into automation technology, Dr.-Ing.
Josef Papenfort, TwinCAT Product Manager)
Descoperă și încearcă!
Beckhoff Automation produce echipamente și
software de înaltă calitate, utilizând tehnologii de
ultimă generație și tehnici de dezvoltare ultramoderne
în realizarea tuturor produselor lor. Pentru a
lua cea mai bună decizie în ceea ce privește pro –
iectele dumnea voastră și pentru a vă familiariza cu
posibilitățile de automatizare specifice dome niului
dumneavoastră, vă rugăm să ne contactați pe adresa:
office@kreatron.ro.
Pentru mai multe detalii referitoare la partenerii
noștri și produsele lor puteți accesa: www.kreatron.ro


